Introduction
The purpose of milestone 2 was to implement a wall following algorithm, expand our line following algorithm, as well as integrate everything from labs 1 and 2.
Updating Our Robot
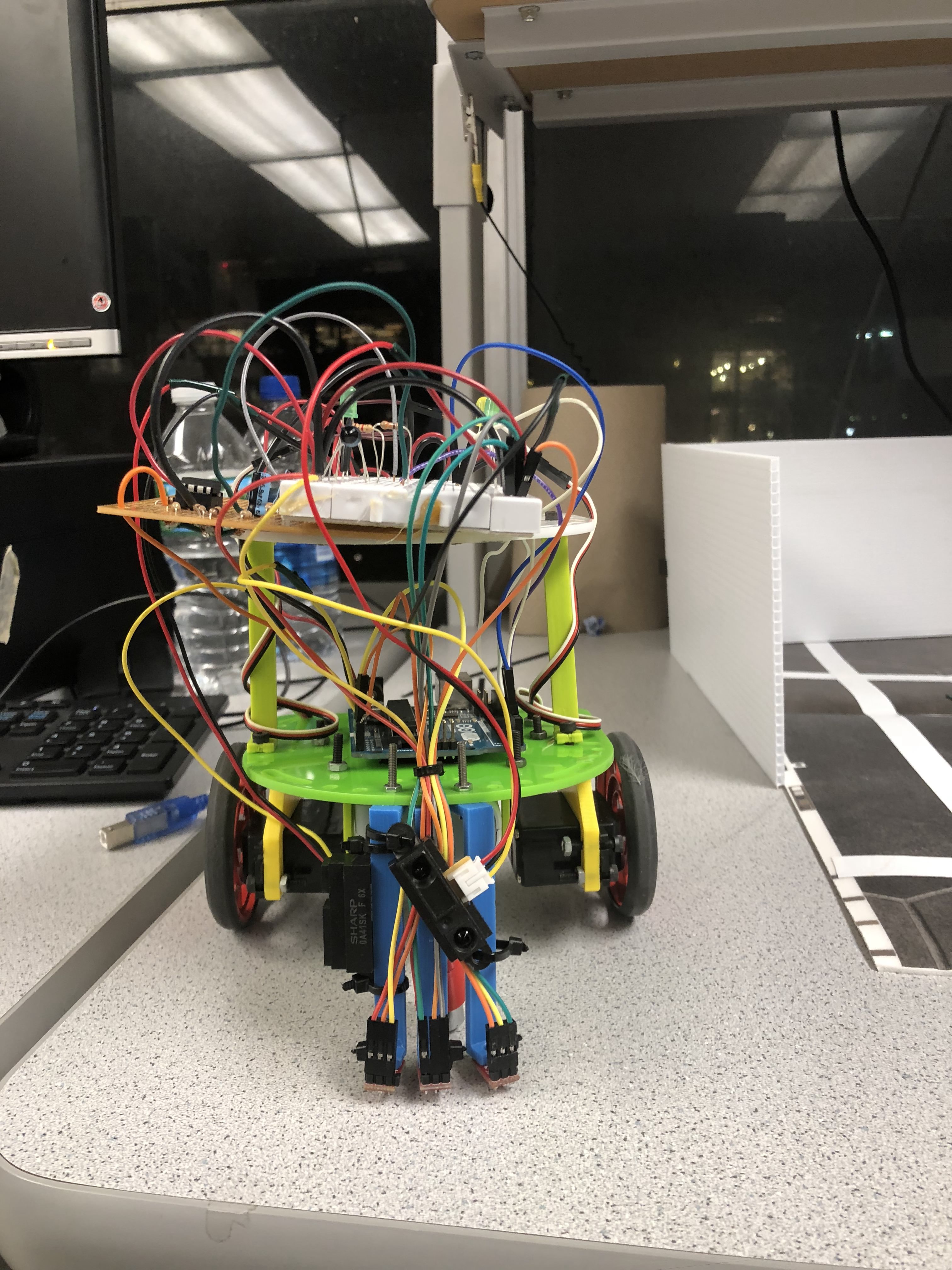
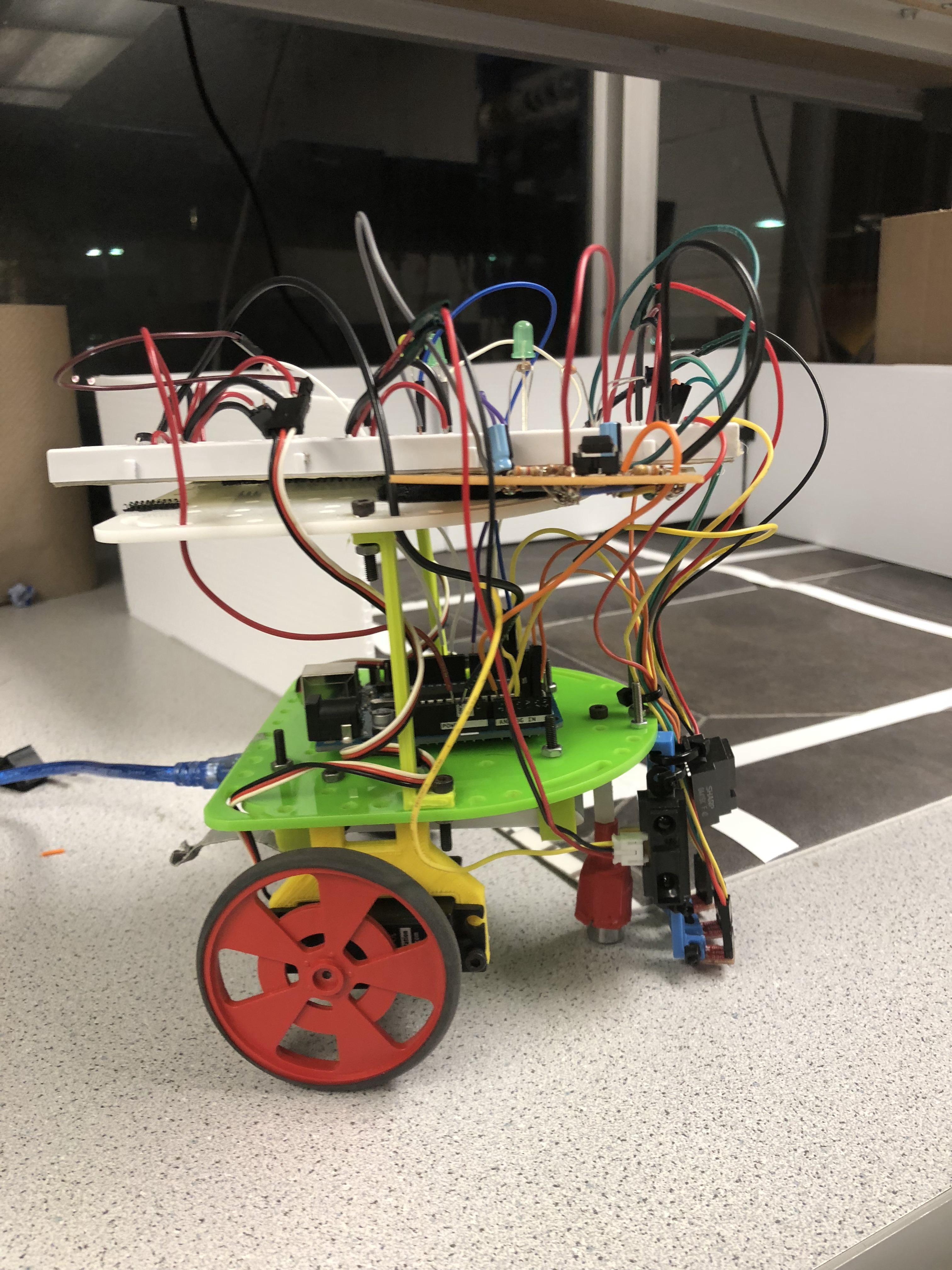
We added wall sensors to our robots front and right side. This allowed us to implement a right-hand wall following algorithm. We tested for the threshold to see a wall and have this in the global variable wall_thresh. If we detect a wall it means our sensor is reading OVER this threshold.
We also rearranged our line sensors to all be the same height and in the same line so that we could use just one global threshold variable line_thresh. If we detect a while line it means our sensor is reading BELOW this threshold.
We added the IR receiver to the top of the robot on the big breadboard but that is only temporary. We have a global variable for the IR threshold IR_threshold. If we detect and IR signal we are reading OVER this threshold
During this milestone our robot got what can only be described as half a makeover. Some wiring was cleaned, and the sensors were all rearranged to be the exact same height. Stay tuned for our upcoming overhaul!
Implementing Proper Turn Functions
Our previous implementation of line follow didn’t really change, but we had to properly implement a function for turning left and right in place. This resulted in the functions:
- turn_left_linetracker()
- turn_right_linetracker()
The functionality can be seen in the specification as well as the code below.
void turn_right_linetracker() {
turn_place_right();
delay(300); //delay to get off the line
/*Following while loops keep the robot turning until we find the line to the right of us*/
while (analogRead(sensor_middle) < line_thresh);
while (analogRead(sensor_middle) > line_thresh);
}
/*Turns to the left until a middle sensor finds a line*/
void turn_left_linetracker() {
turn_place_left();
delay(300); //delay to get off the line
/*Following while loops keep the robot turning until we find the line to the left of us*/
while (analogRead(sensor_middle) < line_thresh);
while (analogRead(sensor_middle) > line_thresh);
}
where turn_place_left() and turn_place_right() simply turn the robot in place by having the servos go in opposite directions at the same rate.
/*Turns to the left in place*/
void turn_place_left() {
servo_left.write(80);
servo_right.write(80);
}
/*Turns to the right in place*/
void turn_place_right() {
servo_left.write(100);
servo_right.write(100);
}
Wall Following Algorithm
With line following in place, our wall following algorithm can be seen in the block diagram below.
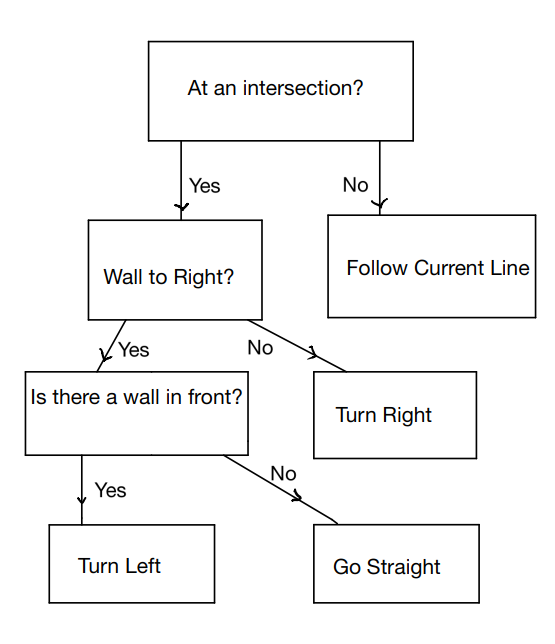
Note: When turning left we turn 180 degrees if there is a wall to the left. THe block diagram repeats itself with each call of maze_traversal() in loop
The maze traversal function maze_traversal() now follows simply from the block diagram.
/*Traverses a maze via right hand wall following while line following*/
void maze_traversal() {
/*Checks if there is a wall and turns on LED if so - allows us to see what robot is thinking*/
check_front();
check_right();
/*If we are at an intersection*/
if (atIntersection()) {
/*Check if there is a wall to the right of us*/
if (!check_right()) {
adjust();
turn_right_linetracker();
}
/*If there is no wall to the right of us and no wall in front of us */
else if (!check_front()) {
adjust(); //adjust here takes us off the intersection allowing us to linefollow
}
/*There IS A WALL to the right of us AND in front of us*/
else {
adjust();
turn_left_linetracker();
/*Following if statement allows for robot to turn around at dead end*/
if (check_front()) {
turn_left_linetracker();
}
}
/*If we are not at an intersection then line follow*/
linefollow();
}
So that we can see what the robot is thinking, we call check_front() and check_right() at the beginning of maze traversal which turns an LED on if the robot detects a wall.
Note: due to the about 3 inch distance from the sensors to the wheels, we implemented the function adjust() so that we could pivot 90-degrees at an intersection. Adjust simply has the robot go forward up until the wheels reach the intersection. The delay value is found via manual testing.
void adjust() {
go();
delay(700); //delay value to reach specification
}
A video of our robot traversing a maze with our right-hand wall following algorithm is shown below.
Avoiding Other Robots
To avoid other robots we had to implement our IR code and maze traversal code in one document. This was tricky because the fft library and servo library use the same timer. To get around this we declared a global boolean variable sees_robot which is initialized to false. We then created the function IR_detection() which essentially runs the fft code from lab 2 and set sees_robot to true as well as turns an LED on when a robot is detected. To get around the issue of the fft and servo libraries using the same timers we used temporary values to store the relevant registers at the beginning of the function and restored those registers to their previous value at the end. The function implementation can be seen below.
void IR_detection() {
/*Set temporary values for relevant registers*/
int t1 = TIMSK0;
int t2 = ADCSRA;
int t3 = ADMUX;
int t4 = DIDR0;
/*Set register values to required values for IR detection*/
TIMSK0 = 0; // turn off timer0 for lower jitter
ADCSRA = 0xe5; // set the adc to free running mode
ADMUX = 0x40; // use adc0
DIDR0 = 0x01; // turn off the digital input for adc0
cli(); // UDRE interrupt slows this way down on arduino1.0
for (int i = 0 ; i < 512 ; i += 2) { // save 256 samples
while (!(ADCSRA & 0x10)); // wait for adc to be ready
ADCSRA = 0xf5; // restart adc
byte m = ADCL; // fetch adc data
byte j = ADCH;
int k = (j << 8) | m; // form into an int
k -= 0x0200; // form into a signed int
k <<= 6; // form into a 16b signed int
fft_input[i] = k; // put real data into even bins
fft_input[i + 1] = 0; // set odd bins to 0
}
fft_window(); // window the data for better frequency response
fft_reorder(); // reorder the data before doing the fft
fft_run(); // process the data in the fft
fft_mag_log(); // take the output of the fft
sei();
Serial.println("start");
for (byte i = 0 ; i < FFT_N / 2 ; i++) {
Serial.println(fft_log_out[i]); // send out the data
if (i == 43 && fft_log_out[i] > IR_threshold) {
digitalWrite(7, HIGH);
sees_robot = true;
}
if (i == 43 && fft_log_out[i] < IR_threshold) {
digitalWrite(7, LOW);
sees_robot = false;
}
}
/*Restore the register values*/
TIMSK0 = t1;
ADCSRA = t2;
ADMUX = t3;
DIDR0 = t4;
}
Integrating Everything
To integrate everything we had to update our function maze_traversal() to include robot detection. The new block diagram is now
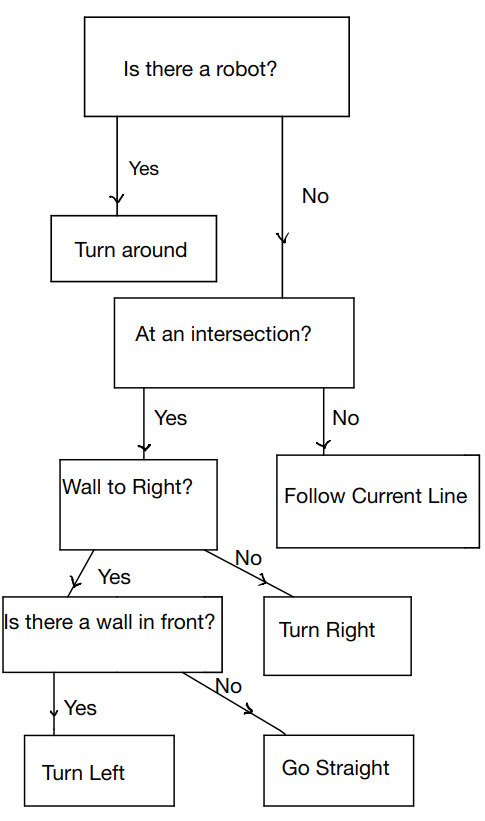
and the maze traversal code following from the block diagram is
/*Traverses a maze via right hand wall following while line following*/
void maze_traversal() {
/*Checks if there is a wall and turns on LED if so - allows us to see what robot is thinking*/
check_front();
check_right();
/*If there is a robot avoid it!!*/
if (sees_robot) {
/*Turn right until we see a line*/
turn_right_linetracker();
/*Ensure that the line we pick up isn't gonna run us into a wall*/
while (check_front()) {
turn_right_linetracker();
}
}
/*If there is NO ROBOT then traverse the maze via right hand wall following*/
else {
/*If we are at an intersection*/
if (atIntersection()) {
/*Check if there is a wall to the right of us*/
if (!check_right()) {
adjust();
turn_right_linetracker();
}
/*If there is no wall to the right of us and no wall in front of us */
else if (!check_front()) {
adjust(); //adjust here takes us off the intersection allowing us to linefollow
}
/*There IS A WALL to the right of us AND in front of us*/
else {
adjust();
turn_left_linetracker();
/*Following if statement allows for robot to turn around at dead end*/
if (check_front()) {
turn_left_linetracker();
}
}
}
/*If we are not at an intersection then line follow*/
linefollow();
}
}
Now, our setup() code just initializes the servos and indicator LEDS, and our code to run in loop() is now just two simple function calls!
/*Set up necessary stuff*/
void setup() {
Serial.begin(115200); // use the serial port
servo_setup(); //setup the servo
pinMode(2, OUTPUT); // LED to indicate whether a wall is to the front or not
pinMode(3, OUTPUT); // LED to indicate whether a wall is to the right or not
pinMode(7, OUTPUT); // LED to indicate whether there is a robot in front of us
}
/*Main code to run*/
void loop() {
IR_detection(); //update sees_robot
maze_traversal(); //traverse the maze
}
A demonstration of our robot traversing the maze as well as detecting and avoiding other robots is shown below.
Going Forward
As we move onto other labs we will likely need to implement a more efficient way to traverse the maze by keeping track of squares we have already visited. We will also likely change the way we avoid robots but turning around seems fine for now.