Introduction
The purpose of this lab was to familiarize ourselves with the functionalities of the Arduino Uno and IDE, as well as assemble our robot. We did this via writing a simple functional Arduino program using external components along with the Arduino Uno.
Lab Implementation
Utilizing the Arduino IDE, we were able to make the Uno’s onboard LED blink using an example sketch found under File > Examples > 1.Basics > Blink.
Blinking the LEDs
// the setup function runs once when you press reset or power the board
void setup() {
// initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
}
// the loop function runs over and over again forever
void loop() {
digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(LED_BUILTIN, LOW); // turn the LED off by making the voltage LOW
delay(1000); // wait for a second
}
We then moved on to blinking an external LED, so we connected an LED to the Uno with a ~300Ω resistor in series to help prevent voltages over ~5V from damaging the Uno.
This is the code we used to blink the external LED, starting with the same base Blink sketch but changing the output pin from LED_BUILTIN to pin 0. Writing HIGH or LOW to pin 0 directed the LED to turn on and off, respectively.
int pin_out = 0; // pin_out can be set to all digital pins
void setup() {
// initialize the digital pin, pin_out as an output:
pinMode(ledPin, OUTPUT);
}
void loop() {
// read the state of the pushbutton value:
digitalWrite(pin_out, HIGH); //turn LED on
delay(1000); //delay
digitalWrite(pin_out, LOW); //tun LED off
delay(1000); //delay
}
Reading and Printing Potentiometer Serial Data
Now we want to read an analog value from a potentiometer hooked up to one of the analog pins on the Uno.
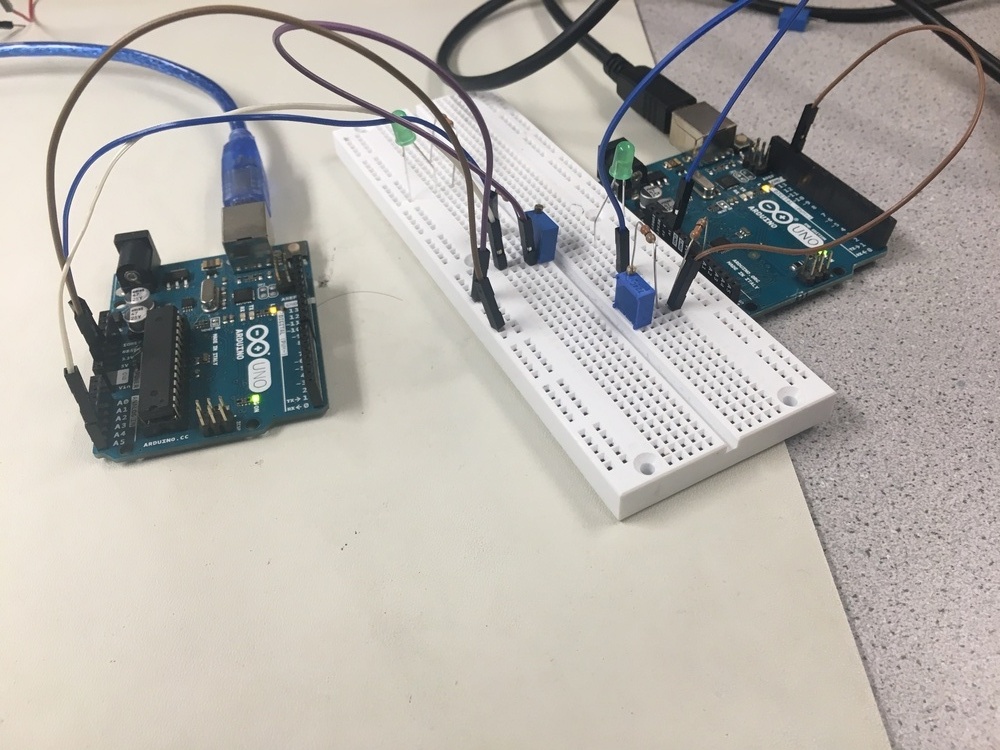
The code we used to read from the potentiometer first declared pin A0 as an input and used the Serial.begin() function to set a bit rate in order to send serial data. We then set up a loop in which the analogRead() and Serial.println() functions read the incoming serial data and print it to the serial monitor. Since we want to sample every 0.5 seconds, there is an added delay() of 500 ms in the loop.
int PINNAME = 0; // PINNAME can be set to all analog in pins
void setup() {
// initialize the digital pin, pin_out as an output:
pinMode(PINAME, INPUT);
Serial.begin(9600);
}
void loop() {
Serial.println(analogRead(PINNAME)); //analog read
delay(500); //delay
}
Mapping Values from Potentiometer to LED
The range of values read from the potentiometer [0, 1024] is four times the range of values able to be written to the LED [0, 255]. In order to be fed to the LED output pin, the serial data read from the potentiometer is divided by four.
int POUT = 3; // POUT can be set to any pin with a tilda (~) next to it
int PIN = A1; //PIN can be set to all analog pins
void setup() {
// initialize POUT output
pinMode(POUT, OUTPUT);
Serial.begin(9600);
}
void loop() {
analogWrite(POUT, analogRead(PIN)/4); //analog write
//the '/4' ensures that ranges for analogRead and analogWrite be same.
delay(250); //delay
}
Mapping Values from Potentiometer to Servo
In order to scale the potentiometer range [0, 1024] to the servo range [0, 180], we multiplied the input by 180/1024.
#include <Servo.h>
int PIN = A1; // POUT can be set to any pin with a tilda (~) next to it
int POUT = 9; //PIN can be set to all analog pins
void setup() {
pinMode(POUT, OUTPUT);
Serial.begin(9600);
servo.attach(9);
servo.write(90);
}
void loop() {
Servo.write(POUT, analogRead(PIN)*180/1024);
}
Assembly and Autonomous Driving
The design of our robot was very simplistic. It had a flat top as its body where the Uno and breadboard rested and servos connected to wheels on either side of it. To balance, it had a leg on the front with a ball bearing on the bottom to reduce friction against the floor. Brackets were screwed underneath the body to hold the 5V battery pack.
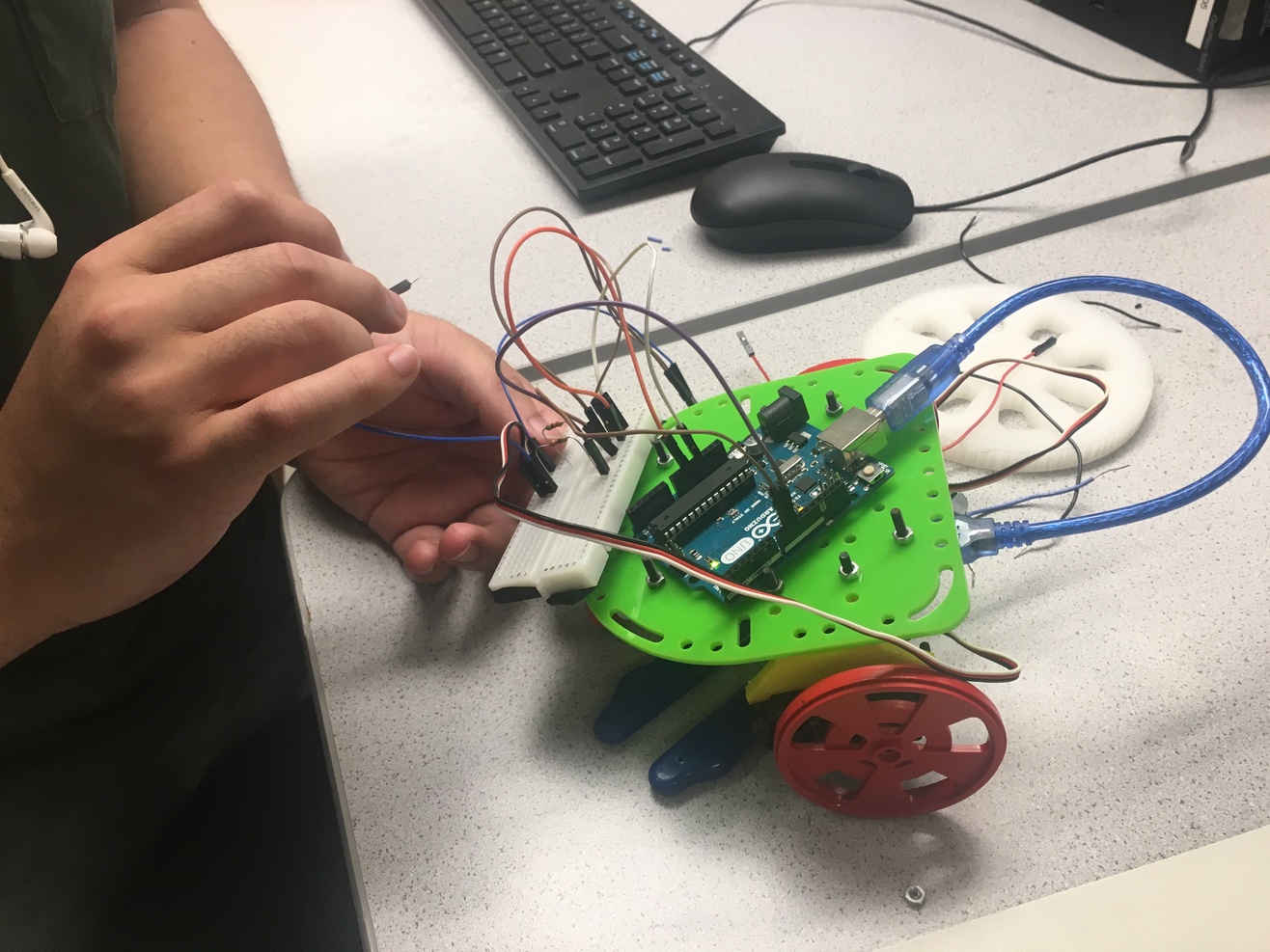
Movement around a square can be broken down into two components: moving forward and turning 90 degrees. To direct the bot to move forward, the right servo rotates clockwise and the left servo rotates counterclockwise. To complete a 90 degree turn, both servos are set to rotate clockwise so that the right wheel moves forward and the left wheel moves backwards, turning to the left. Through testing we found that a 90 degree turn took about 0.72 seconds so a delay of 720 ms was added. The size of the square path is set by the duration that the robot is directed to move forwards, in this case two seconds.
#include <Servo.h>
Servo servo_left;
Servo servo_right;
void setup() {
servo_right.attach(9);
servo_left.attach(10);
servo_right.write(90);
servo_left.write(90);
}
void loop() {//loops over a 90 degree turn and a a forward movement
servo_right.write(180);
servo_left.write(180);
delay(720);//turns robot 90 degrees
servo_right.write(180);
servo_left.write(0);
delay(2000); //continues straight for 2 seconds
}